А_МУР писал(а):
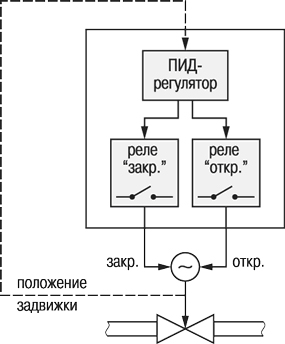
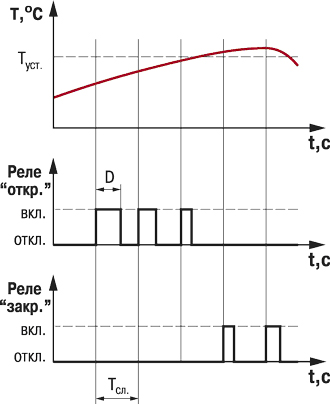
изучив диаграмму мы делаем вывод что мы имеем дело с ШИМ (широтно импульсной модуляцией)
Тсл это как я думаю будет задавать не только ШИМ для выходов ОТКР ЗАКР но и такт работы всего алгоритма
Еще я предполагаю что Tсл не может быть меньше время минимального импульса задвижки
Если это не так, прошу поправить меня!
Тсл это как я думаю будет задавать не только ШИМ для выходов ОТКР ЗАКР но и такт работы всего алгоритма
Еще я предполагаю что Tсл не может быть меньше время минимального импульса задвижки
Если это не так, прошу поправить меня!
Судя из описания ШИМ он должен быть хотя бы в 10 раз больше минимального импульса
| Вложения: |
|
princzip_shim___2a4def6f-333x300-d.jpg [ 18.48 КБ | Просмотров: 8529 ] |
|
princzip_shim_dlya_nagrevatelya.jpg [ 51.11 КБ | Просмотров: 8529 ] |
{kind=link}
{kind=link}